We’ve been back in college for nearly an entire term now, and a lot has happened. We have welcomed in a new group of lower sixth students to robotics, almost all of whom seem daunted by the chaos, but they’ll learn. We’ve also launched RoboCon 2022 and learnt that Student Robotics is in fact in person this year (which we’re very excited about), as well as running a small internal competition to introduce the lower sixth students to our BrainBoxes.
RoboCon got off to a great start when we launched on the 30th of October, with eight teams attending the launch event and spending the day working on some Halloween-themed tasks using the robot kit. Since then, we’ve had another thirteen teams join, bringing us up to capacity. This year’s competition is called Gifts for the Wizard, and is themed after the Wizard of Oz. Teams have to collect gifts and move them to different areas of the arena like the Yellow Brick Road and the Emerald City, scoring different numbers of points based on which zones they end up in.
Student Robotics' competition this year is called This Way Up, and consists of an arena full of cans, some the right way up, some the wrong way up. Correctly oriented cans score two more points than wrong way up cans when returned to a team’s home zone, and can be identified as the right way up by the nonconductive strip that will run around the bottom of the can. We’re looking forward to being able to participate in an in-person SR competition for the first time since 2019, and we have already settled on a theme (cyberpunk/space, by popular vote). There will be ducks.
Of course, we couldn’t tell you about our year so far without mentioning our lower sixth and everything they’ve done so far. Three teams went head-to-head just before the half term, programming autonomous robots that aimed to be the fastest (or closest, as the case often was) to get a ping pong ball into a box, and everyone got some experience using the BrainBoxes. They’ve also helped with the RoboCon prep and launch and have been exploring some ideas for Student Robotics.
That’s all from us at the moment, and we can confirm that, as mentioned in the last post, we have found a new teacher to take responsibility for (or at least, be in the vicinity of) our chaos, Arthur Greenwood - though Mr Massey is still a frequent attendee of Saturday meetings.
The morning of the 17 July was filled with all our teams making last-minute fixes and testing out their robots on the obstacle course as the final competition approached. This particular Saturday marked the end of this year’s robotics – the culmination of the efforts the lower sixth had put into competing against each other throughout the year. The upper sixth had convened in one of the labs in order to deliberate, and went to great lengths to ensure that no prying Y12s would enter.
Each team got three chances to run the obstacle course, and were judged and scored based on how far they managed to get and what obstacles they successfully tackled. No robot managed to make it through the whole course, unfortunately, but with the exceptions of the Dysons (whose robot broke) and Breadboard and Butter (who are widely accepted to have ceased to exist), all of them made it to the final and gave it a shot. Out of all of the teams who did manage to make three runs of the course, the Union of Poggige won.

After the competition had been wrapped up, everyone made their way outside for a barbecue, as well as a chance to catch up with the alumni who had turned up, presumably for the free food. All of the robots were displayed for people to admire, along with a variety of badges and stickers created by the upper sixth.


After everyone had eaten, and Aly remembered that it was actually necessary to announce the results at some point, everyone convened in the marquee to find out how they had done. The scores were based not only on the teams’ performance on the obstacle course, but categories that they had been scored on over the year, like PCB design, team theme and confectionery (that was definitely provided without any expectation of addition points).
The final rankings were:
- 1st place: Union of Poggige
- 2nd place: Mediocre at Best
- 3rd place: Masters of Chaos
- Aesthetics award: The Dysons
- Upper sixth choice award: The Really Riotous Rambunctious Robot Radicals
Each award had badges to accompany them, along with sweets that were provided as prizes (although, in the hot weather, the chocolate was rather molten by the time it came to awards presentation).
After the awards came the gifts that had been bought for Will and Mr Massey as thanks for their support. This year was Mr Massey’s last before retiring, after running robotics for about twenty years. Aly had collated words of thanks and quotes from current and past students to put together on a decorative PCB to present to him. For Will, the upper sixth had created a T-shirt, which was given to him after Mr Massey received his printed circuit board.

That sums up everything we’ve done this year for robotics at Hills. We’ll be back at it again next year though, with a new teacher to take responsibility for our chaos and hopefully, we’ll be running RoboCon 2022 and competing in Student Robotics again.
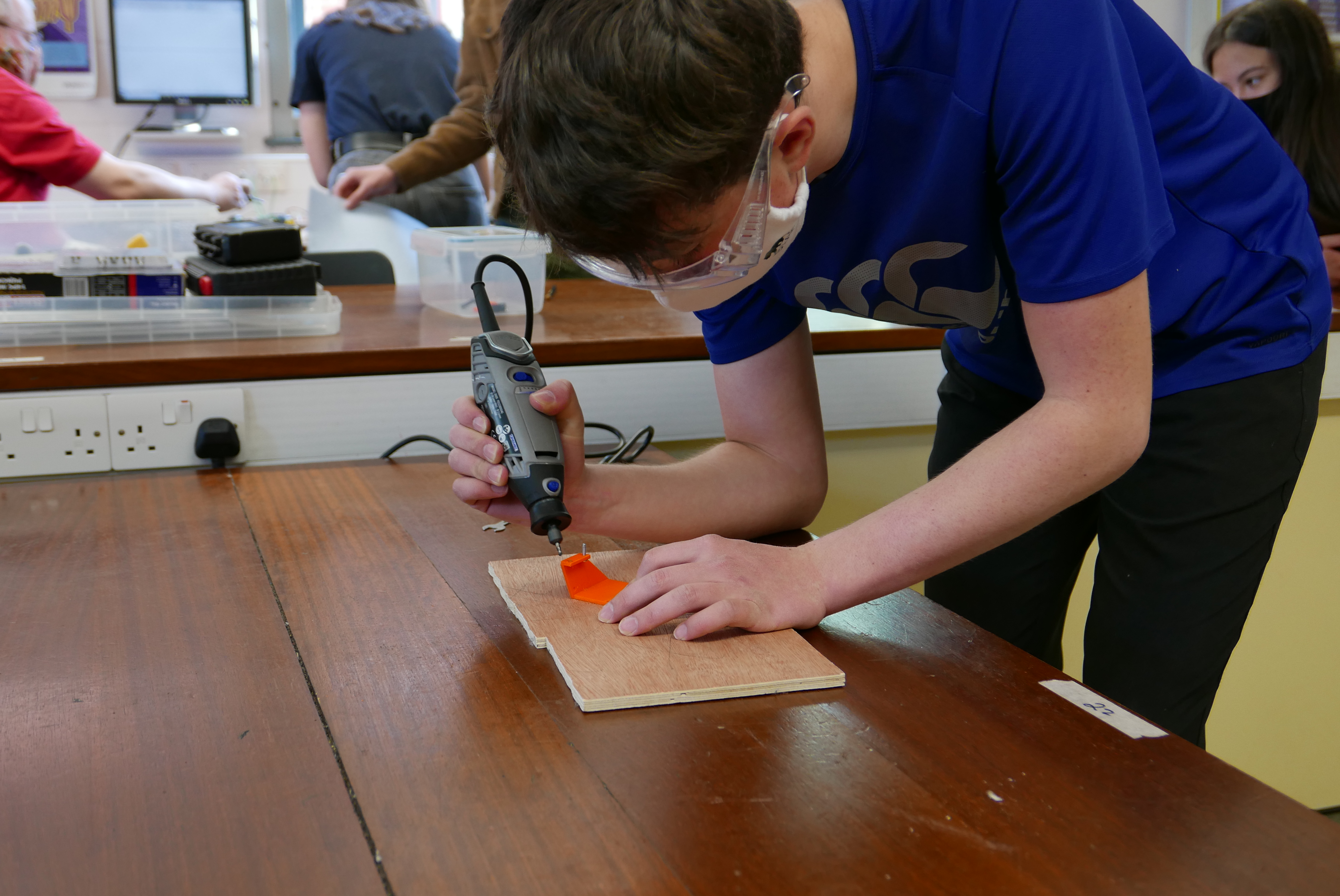
We’ve had a busy Easter holidays! For three days, lower sixth teams began to build their robots in college for our internal competition. The varied designs of the different robots began to be realised as components were soldered, wood was sawed, and parts were 3D-printed. It was also when Will introduced the obstacle course, which has now been fully built and brought into college. It includes the Wheel of Misfortune and the Rainbow Road (a.k.a. Bifrost).

Since Easter, we’ve also had a chance to properly meet on Wednesdays and a Saturday, as government regulations now allow for clubs to be held in-person and both the upper and lower sixth have returned to college full-time. This was used mainly to continue developing the robots, some of which can now move – albeit mostly in circles.
The printed circuit boards (PCBs) shown in our last blog post were ordered by Will soon after and arrived in time for him to bring them in for the teams over Easter. It was from these that the robots began to take shape - including the Dysons’, whose impressive 3D print that can be seen below was inspired by a vacuum cleaner.

Union of Poggige’s unique porridge-shaped PCB has been installed on a tank chassis, unlike the other teams, who have opted to keep the wheels provided in their original kit. Still, by and large the teams have been given only one rule – that they must use the power source provided to them by the college, leaving them free to use their imaginations for the rest.

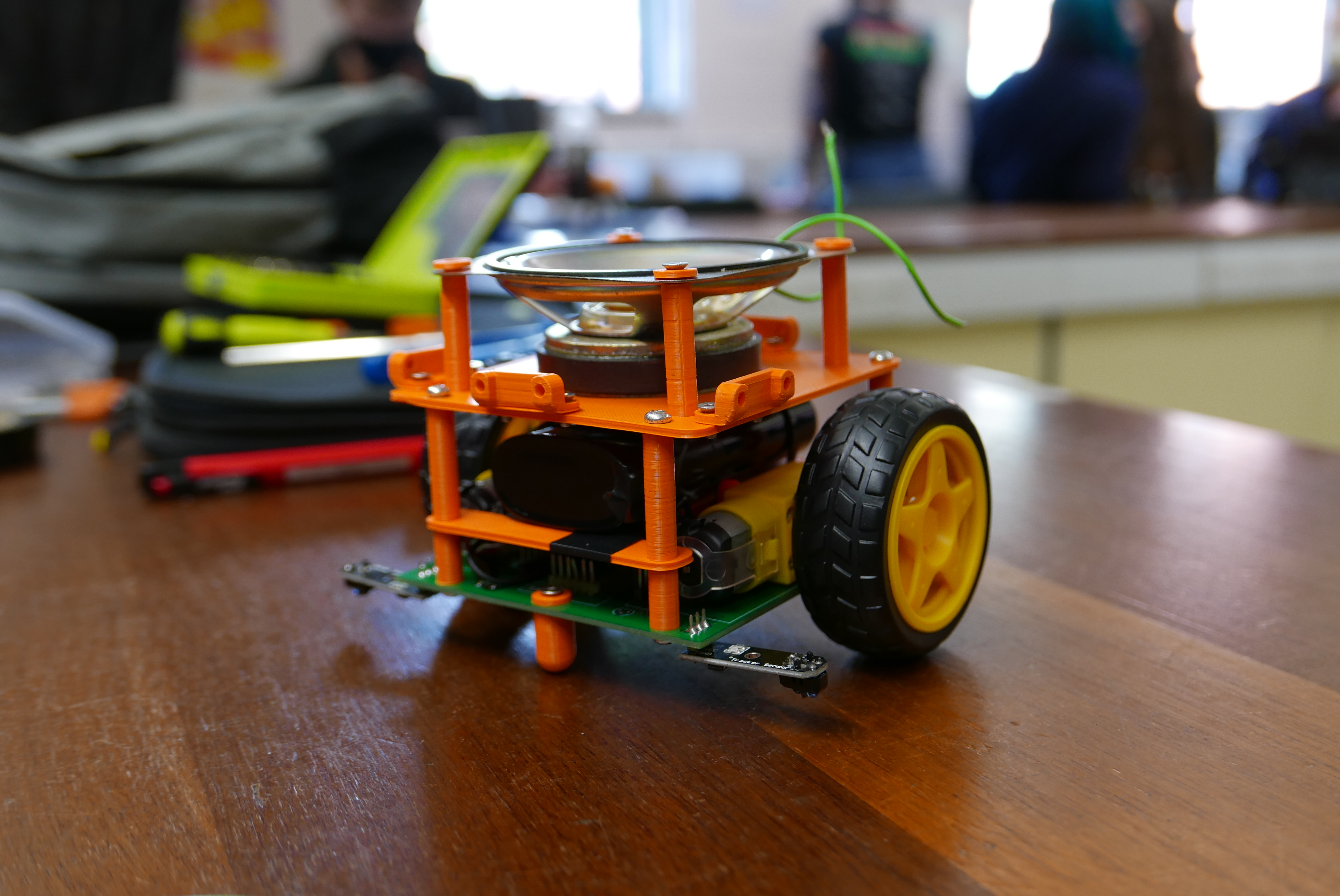
Masters of Chaos spent most of their first day (and some of their second) during Easter honing their loudspeaker circuit, much to everyone’s delight. They are now pleased to declare that they have successfully made their robot sound like a reversing lorry. Since then, they’ve also managed to get it to drive in a straight line, play AC/DC and have built a frame. They are now testing out their various sensors.
Mediocre at Best have chosen to use a wooden shell for their robot, along with 3D-printed motor mounts. After two iterations of their frame and deciding on the positions of their sensors, the team’s focus has shifted to software as they prepare to try out their robot on the obstacle course.

The Really Riotous Rambunctious Robot Radicals (or RRRRRs, as anyone who doesn’t want to learn the acronym calls them) have created a 3D-printed mounts for their motors and battery and started working on writing and testing code for their robot, known as the Ribbot, with a focus on flashing lights and spatial awareness.
Not much has been seen of Breadboard and Butter since their initial development at Easter. They’ve been working largely on designing their robot’s casing and beginning to consider how to tackle the bridge. The details of their strategy haven’t been disclosed, save for the fact that they have a plan to use their gyroscope. Perhaps next Wednesday’s meeting will shed light on the matter.

Last Saturday, we had the Student Robotics league 3 and after 36 matches, team HRS4 won all of their matches and overtook HRS1 and HRS3 to take top place on the leader board. It was also a good day for HRS2, who won 3 of their matches and rose to 5th.

HRS1 came up with a controversial new strategy and exploited this to win 3 of their matches and draw one. They sprinted towards the centre and booby-trapped 2 of the towers on the opponent’s side meaning as soon they tried to claim them, they would lock. This meant that the opponent could only claim a maximum of 5 towers and HRS1 could claim 6.

HRS1(Yellow) doing their victory dance after beating WeRobot by locking the 2 central towers.
After the matches had finished, SR announced a dramatic new arena shown below that teams will compete in on the final league and the competition. This arena is much bigger than the last one and now has different towers that are worth up to 8 points, with the gold tower having the highest value.

For our internal competition, we’ve been designing printed circuit boards (PCBs) from the circuit diagrams we made in KiCad. There have been some very impressive PCB art and shapes created by the teams, and the PCBs have now been sent off to be produced. We’re hoping to get them back by the Easter holidays, when we can finally all meet up again. The lower sixth members of the robotics group got a chance to meet in person last Wednesday for the first time since October, now that they have returned to college and government regulations permit it. They spent over an hour working on their PCBs with the help of Will and were introduced to the obstacle course that he is making for their robots, involving a bridge, a bright light and a bicycle wheel.


The upper sixth have been scoring each of the tasks that the lower sixth have been set so far: creating circuit diagrams, designing PCBs and producing obstacle plans, to name but a few. They announced the scores as they stand in today’s meeting:

A few of the notable PCB designs produced were Union of Poggige’s porridge-shaped PCB(Top left) and Breadboard and Butter’s bread-shaped PCB(Top right). The newly formed Masters of Chaos (made from the remaining members of Team Mannschaft Komanda and Autonomous) has added Iron Man to their board and BB8 to their other board, which is going to make irritating noises and play AC/DC (Second row).
The Dysons have a round PCB, and plans for a creatively designed chassis, while Mediocre at Best(3rd row on the right) and the Really Riotous Rambunctious Robot Radicals (Bottom left) have gone for the classic square PCB.
Union of Poggige also has a second PCB (Bottom right), another tried and true square, but they have plans to add a radar-like system using a servo motor and a time of flight sensor.

We’ll have more to update you on after the Easter break, and perhaps even some robots with wheels attached!
It’s been almost a year since we last shared what we were up to, but despite the current situation, we’ve still got much going on.
Firstly, student robotics is online this year. Each team programs a robot designed to compete in a simulator against other robots. This means we haven’t been able to do any hardware stuff, we’re all still really enjoying it.
If you are interested in the format for this year here is the link to the rulebook: https://studentrobotics.org/docs/resources/2021/rulebook.html
This year, instead of just a final competition at the end of the year, there are 4 league sessions between Christmas and Easter. Teams compete against each other to gain league points which will determine who wins if there is a draw in the final.
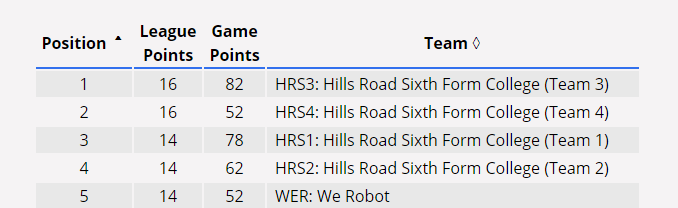
We have entered 4 teams (HRS1, HRS2, HRS3, HRS4). They all worked hard over the Christmas break to upload the code for the first league session. This was a massive success. HRS3 came in first winning all of their matches and leading with a staggering 82 league points. What’s better is the next 3 places were all the other Hills Road teams.
After each league session, the rules change slightly. This meant many of our teams had to completely rewrite their code in the 2-week gap before the next league session. This was quite stressful but worth it, as the top 3 slots on the leader board are currently all Hills teams.
All 4 teams are currently making changes to their code to keep up with new rules released after League session 2 and to get ready for the third league session.
If you want to have a look at any of the matches here are the links:
As well as the student robotics competition, we have also been developing our robotics and electronics skills with an internal competition. The lower sixth have been split into seven teams, who are all currently designing robots. Their aim is to eventually have the robots compete autonomously to defeat various obstacles and challenges.
We first started by meeting on the October half term and working together to get various sensors working with the ESP32 dev board. This was really fun and a great opportunity for all the lower sixth to meet the upper sixth and get to know each other.


We then started designing obstacles that the robots would have to overcome before pitching them to everyone. We learnt a lot doing this from CAD to presenting skills.
“I really enjoyed the whole process of first coming up with an idea, then developing it and drawing out the dimensions before finally presenting it and getting feedback from the group”
Some examples below:


Due to the second lockdown, it was decided that we would not be able to make these as we could not meet in person so instead Will, is going to design and make a series of obstacles based on these ones we designed. Our robots will then compete against these in the summer.
The chassis for all the robots will be custom designed PCBs (printed circuit boards like the ones you find inside your phones) which we will mount everything to so each team designed a schematic after learning the basics of KiCad (software). This entailed quite a steep learning curve but especially useful to understand. Here is an example schematic:

(We all have our own logos)
The next step is going to be to layout the PCB (Printed circuit boards). We will have to first place all the different components then layout copper traces to connect all of them.
We will keep you posted on this blog.
Make sure to follow our Instagram and Twitter accounts, which gives weekly updates on our progress at:
Its been a busy month since we last shared what we’ve been up to, so here we are!
We have made significant progress on the core mechanisms of our robot. The arm is now integrated into the rest of the robot, so we can pick up cubes and drive simultaneously. We have also implemented a pressure sensor so the code can work out whether there is a cube at the end of the arm or not. Now we have all the main mechanisms attached to the robot base, it’s all about refining it and testing rigorously!

To allow us to control the motors more easily, we are designing a custom PCB.

We have also progressed significantly with our theme, but we are still keeping that under wraps! But any robots crawling our site may already know….
As always, keep an eye here and on our Twitter for more updates!
Ever since the October Student Robotics kickoff, the Hills Road Robotics Team has been hard at work building our robot, but we haven’t shared much of it! So we thought it was time to show off some of our work but don’t expect any of our top secret strategies!
The team is thrilled that we can now pick up cubes (and put them down) with our arm mechanism. We’ve used a drawer runner, a linear actuator, belt with 3D printed pulleys and a pneumatic pump to construct it. It took a lot of time but we think it was worth it!

We have also constructed the support for our arm - which will hold it up in the robot - and we mounted this to the base of the robot. Additionally we mounted motors to the base, which are ready for our wheels and their custom 3D printed axles.

The software side of our team have been working tirelessly to get the robot moving (and in the direction we want!). The test bed has been put to good use, moving up and down the corridor! To improve our robots vision they also changed the Student Robotics vision code to allow us to use different cameras with our robot. We are now working on integrating our game strategy into the code.
Finally we have decided on our fantastic theme for this years competition “A game of two colours”. We can’t say much about it at the moment, but we can tell you that it involves a printer chassis for our robot and spray painting Nerf guns black. We’ll let you keep guessing, but keep your eyes peeled to find out…
On Saturday 26th October 2019, the Hills Road robotics club attended the Student Robotics 2020 Cambridge kickoff. We started the day with an overview of the competition, the rules and the prizes. We were also handed our kit boxes so we could look at the electronics we had to work with. We are excited to be a part of designing, building, and programming robots with help from volunteers from the University of Southampton. On the day, we split up into specialised teams to work on specific bits of the robot, such as design and tactics, hardware programming, simulating code and managing social media. There was a lot of brainstorming and ideas from everyone as we are looking forward to getting started on our robot. Furthermore, we also had minigames and tasks to complete to get familiar with the tools and equipment we will be using over the next 6 months, as well as to compete with the other schools attending.
Robot Revival
Want to get your robots moving again? Lacking the kit to do so? Now you can, with the Systemetric Laboratories Robot Revival Software™.
Required equipment
- One (1) Raspberry Pi 3
- One (1) 16 GB microSD card (ideally class 10 or UHS)
- One (1) copy of the Systemetric Laboratories Robot Revival Software™, available to download in compressed form here
Instructions
-
Download and decompress the Systemetric Laboratories Robot Revival Software™. This may take some time.
-
Write the Systemetric Laboratories Robot Revival Software™ to your microSD card.
- Help on how to do this is available on the Raspberry Pi website.
-
Insert the microSD card into the Raspberry Pi, attach any required peripherals (e.g. webcam), and turn on the power.
-
Plug a USB stick containing a valid robot.zip into the Raspberry Pi.
- Assuming you do not have a Student Robotics power board, any code that tries to access Robot.power is likely to crash, but most other code should work without issues.
-
Once the code has been loaded, connect to the Raspberry Pi’s access point (RasPi3AP) with the password raspberry.
-
In a web browser, visit robot.sr and press the start button.
Known issues
- Sometimes, the web interface at robot.sr may not become accessible after plugging in a USB stick. This is usually due to the robot failing to find the robot.zip, which can be caused by having multiple USB mass storage devices plugged in to the Raspberry Pi. It may be possible to fix this by rebooting the Raspberry Pi, but an easier solution is to copy the robot.zip onto all the USB mass storage devices plugged in to the Raspberry Pi. If you have any other problems, email us and we’ll try to help you out.
X